
Are you 18 years old or older?
Sorry, the content of this store can't be seen by a younger audience. Come back when you're older.
Note: Currently shipping REV 8, it has 3x ICM-45686 IMU with BalancedGyro™ Technology, please see this page for the latest firmware support information.
PX4 Development Kit - X500 v2 is an affordable, lightweight, and robust carbon fiber professional development drone kit with the latest Holybro Pixhawk 6C or Pixhawk 6X Flight Controller, M8N GPS, and plug & play SiK Telemetry Radio. It is quick and easy to assemble (~30 minutes) without the need for soldering, so you can spend more time flying and developing instead. It comes with the X500 V2 Frame Kit and motors, ESCs, power distribution boards, and extra propellers. The Drone Arms are pre-installed with Motors and ESCs so they can be plugged right into the power distribution board without the need for soldering.
The Frame (X500 v2) is made with full carbon fiber twill, with carbon fiber tube arms supported by the newly designed fiber-reinforced nylon connectors with convenient notches on both motor and body sides, providing a much easier & more straightforward installation. The landing gear consists of 16mm & 10mm diameter carbon fiber tubes with connectors that have been thickened and strengthened.
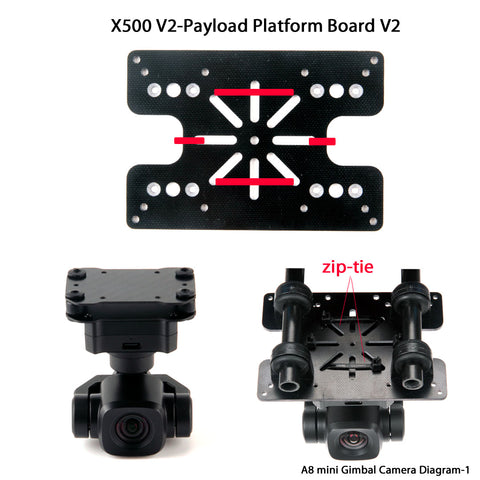
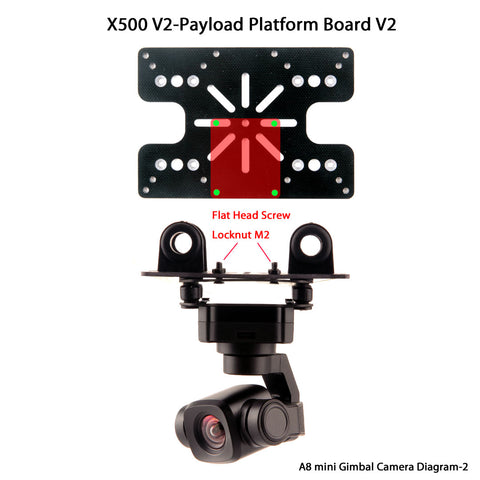
The platform board now has mounting holes for GPS & popular companion computers such as the Raspberry Pi 4 & Jetson Nano. There is an optional Depth Camera Mount (available separately) for various depth cameras such as the Intel RealSense series & Structure Core Depth Cameras. The spacing between the top and bottom carbon fiber plates has been increased to provide easier access. The adjustable battery mounting board has been enlarged to support bigger batteries for longer flight times. The rail mounting system is ready to take a whole host of camera mounts and gimbals for various applications. All tools for installation are provided in the package.
Note: The Pixhawk 6C Flight controller is compatible with both PX4 & Ardupilot, but it is shipped with PX4 open-source firmware.
Note:
Firmware Support for M10 GPS: PX4 1.14 and ArduPilot 4.3 or newer is required.

PX4 Setup Guide
Ardupilot Setup Guide