
Are you 18 years old or older?
Sorry, the content of this store can't be seen by a younger audience. Come back when you're older.
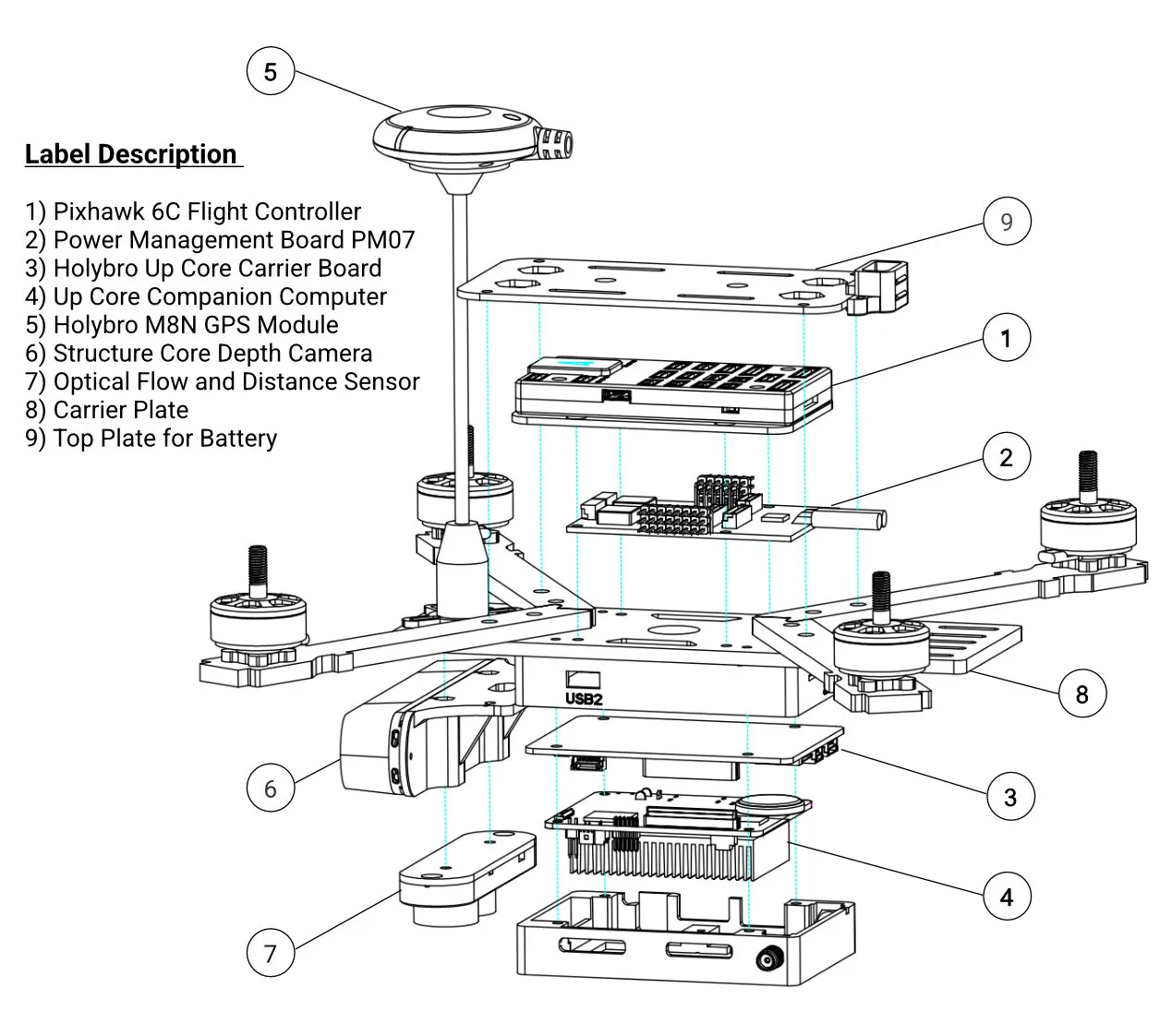
The PX4 Vision Autonomy Development Kit is a robust and inexpensive kit for enabling computer vision development on autonomous vehicles. The kit contains a near-ready-to-fly carbon-fiber quadcopter equipped with a Pixhawk 6C flight controller, a UP Core companion computer (4GB memory & 64GB eMMC), and an Occipital Structure Core depth camera sensor. Ships pre-assembled.
Note: This vehicle comes with no software preinstalled. There is a pre-imaged USB stick that has a reference implementation of the PX4/Avoidance local planner software provided by Auterion. This is a basic software used only as a reference to show the basic function the PX4 vision can do. Developers can use the kit to try out other features provided by the PX4 Avoidance project, modify the existing code, or experiment with completely new computer vision-based functionality. The software is not compatible with the latest version of PX4, nor is it actively maintained or supported.
The PX4 Vision Development Kit contains following components:
USB1: USB3.0 A port used for booting PX4 avoidance environment from a USB2.0 stick (connecting a USB3.0 peripheral may jam GPS).USB2: USB2.0 port on a JST-GH connector. Can be used for second camera, LTE, etc. (or keyboard/mouse during development).USB3: USB2.0 JST-GH port connected to depth cameraHDMI: HDMI out